- Inicio
-
Columna de elevación robótica JCLCTN-3: revisión técnica y guía de integración
Vistas:0 Autor:JIECANG Co., Ltd. Hora de publicación: 2026-01-31 Origen:https://www.jiecang.com/







Columna de elevación robótica JCLCTN-3: revisión técnica y guía de integración

Conclusiones clave
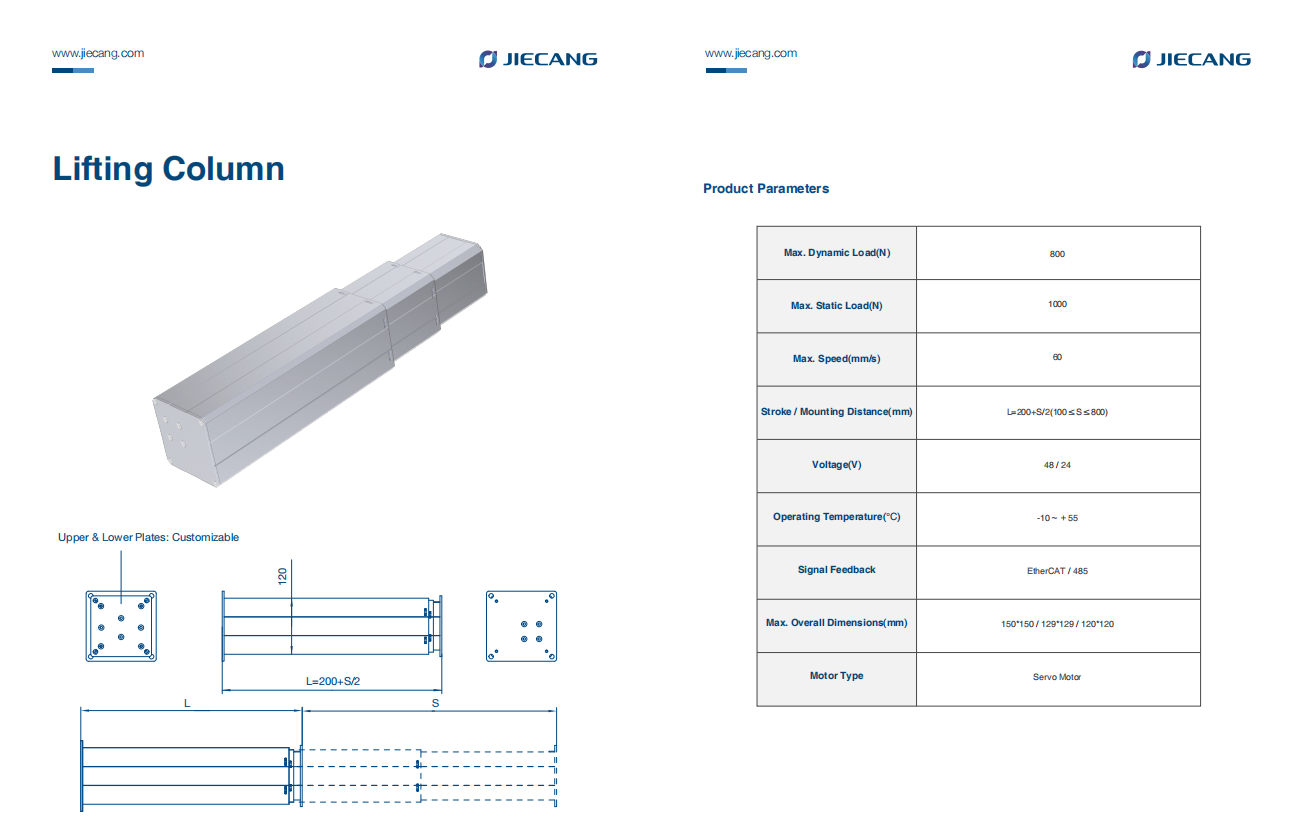
Alta estabilidad: soporta un momento de flexión dinámico de 200 Nm (estático de 300 Nm) para evitar que se tambalee.
Diseño compacto: perfil de 120 mm x 120 mm integrado con un controlador interno.
Rendimiento: Velocidad máxima 60 mm/s ; Carga dinámica máxima 800N.
Control inteligente: admite EtherCAT y RS-485 para colaboración de robots en tiempo real.
Durabilidad: Funciona en temperaturas de -10°C a 55°C.
La "columna vertebral" de los robots móviles: análisis de estabilidad
En el diseño de robots móviles autónomos (AMR), el sistema de elevación determina el rango operativo y la estabilidad del robot. No se trata sólo de levantar; se trata de mantener estable la carga útil durante el movimiento.
El JIECANG JCLCTN-3 está diseñado para resolver el desafío crítico de la 'estabilidad de carga lateral' . A diferencia de los actuadores estándar, está diseñado para resistir las fuerzas laterales generadas cuando un robot acelera o se detiene.
Momento de flexión dinámico: 200 Nm
Momento de flexión estático: 300 Nm
Impacto en ingeniería: esta alta capacidad de momento de flexión garantiza que los módulos montados en la parte superior, como brazos de robot colaborativo (cobot) o conjuntos de sensores de precisión, permanezcan estables sin oscilaciones, incluso cuando el AMR navega por pisos de fábrica irregulares.
Dimensiones e integración compacta
La eficiencia espacial es vital para el diseño de chasis de robots. Cada milímetro cuenta al montar baterías, LiDAR y unidades informáticas. El JCLCTN-3 presenta una estructura altamente integrada para maximizar el espacio disponible.
Tamaño/formas personalizados disponibles
Integración del variador: motor y controlador incorporados (no se requiere caja de control externa).
Al integrar el sistema de accionamiento dentro de la columna, el JCLCTN-3 reduce la complejidad del cableado y permite un diseño de robot más limpio y compacto.
Datos de especificaciones técnicas
A continuación se muestran las métricas de rendimiento verificadas para JCLCTN-3 , diseñado para estándares de automatización industrial.
Conectividad inteligente y durabilidad
El JCLCTN-3 está diseñado para interactuar sin problemas con el 'cerebro' (sistema operativo del robot) del robot.
Control en tiempo real: a través de EtherCAT o RS-485 , la columna proporciona retroalimentación en tiempo real sobre la posición y el estado, lo que permite un control de circuito cerrado para tareas complejas y sincronizadas.
Adaptabilidad a todo clima: con un amplio rango de temperatura de trabajo de -10 °C a 55 °C , la columna es adecuada para diversos entornos, desde logística de cadena de frío hasta robots de patrulla al aire libre.

Próximos pasos para usted?
¿Listo para validar el JCLCTN-3 para su aplicación robótica?
[Descargar componentes de accionamiento central de JIECANG Robotics] https://www.jiecang.com/Lifting-Column-JCLCTN-3-pd550110748.html
[Contáctenos] https://www.jiecang.com/contactus.html
















